Shaownak Shahriar
AI & Software Engineer | Computer Vision & Backend Systems
AI & Software Engineer specializing in Computer Vision, Autonomous Systems, and Scalable Backend Architecture. Passionate about bridging the gap between cutting-edge algorithmic research and robust, production-ready infrastructure. Proven expertise in building end-to-end intelligent systems—from deploying real-time perception models on edge devices to architecting microservices-based web applications—utilizing PyTorch, Django, and modern MLOps principles.

Technical Skills
Machine Learning & Computer Vision
Deployment & MLOps
Backend & APIs
Edge AI & Robotics
Languages & Tools
Professional Experience
- Developed real-time underwater image enhancement systems using GAN-based image translation.
- Managed sensor interfaces and integrated Jetson Orin Nano, Pixhawk, and Raspberry Pi for onboard inference and control.
- Optimized model performance for embedded inference using TensorRT and TorchScript.
- Built robust control software for autonomous underwater vehicles.
- Designed vision pipelines for underwater robotics using YOLO, SAM, SSD, Mask-RCNN, and U2-Net.
- Trained, fine-tuned, and deployed models for real-time vision inference directly on Nvidia Jetson Nano edge devices.
- Led vision and control system development for autonomous underwater vehicle operations.
- Developed terrain-aware SLAM and mapping systems using LiDAR, IMU, and GPS data.
- Integrated ROS-based autonomy and motor control on embedded platforms for real-time navigation.
- Trained custom object detection models (YOLOv5, Faster R-CNN, SSD) specifically for Mars-like terrain autonomy.
Leadership, Teaching & Community Engagement

- Co-founded an autonomous VTOL research initiative, leading perception and autonomy development.
- Led autonomous development for surveillance and rescue missions.
- Represented the team at the IMechE UAS Challenge 2024 in Leicester, England.
- Successfully deployed the drone in a flood rescue mission in Feni, delivering relief supplies to affected communities.
- Featured in leading media outlets including Prothom Alo, The Daily Star, and Robi Axiata.
- Conducted market research and stakeholder analysis for drone-based delivery and rescue services in Bangladesh.
- Initiated discussions with industry partners to explore collaborative drone surveillance and emergency response solutions.



- Invited as a guest instructor to deliver specialized training and guidance on robotics and autonomous systems for university students.

- Taught the "Introduction to Robotics" course at BRAC University Residential Semester for three consecutive semesters.
- Instructed hands-on sessions at the BRAC Hope Fest in June 2023.

- Organized and conducted multiple technical workshops including "Basics of Robotics" and "Introduction to Computer Vision".
- Built and maintained strong community connections within the robotics and academic sectors.
Education
- Currently pursuing advanced coursework focusing on Data Science, machine learning algorithms, and advanced computing infrastructure.
- Thesis: Point-Cloud-based 3D Object Detection for Autonomous Navigation (Awarded Best Thesis of the Year 2024).
- Research Interests: Computer Vision, Rover Autonomy.
- Notable Courses: Quantum Computing, Artificial Intelligence, Neural Networks, Robotics, Pattern Recognition, Software Engineering, System Design.
- Mentorship: Mentored 4 undergraduate thesis groups on applied Computer Vision research (including Driver Safety, Breast Cancer Detection, and Underwater Waste Detection).
- Competitions: Represented BRAC University in multiple International Robotics Championships (UGV, AUV, UAS), national robotics competitions, and Intra-University Programming Contests (IUPC).
- Key Involvement: Co-Founder of RaptorX, Senior Engineer at Mongol-Tori, and Sub-Team Lead at BRACU Duburi.
Academic Thesis
- Proposed a hybrid GLENetVR + SE-SSD model combining voxel-based and point-based learning for LIDAR object detection.
- Implemented 3D bounding box regression with spatial attention to enhance accuracy and reduce inference latency.
- Recognized as Best Thesis of the Year 2024 by the Department of Computer Science.
- Submitted to the CVPR 2026
Selected Projects
Applied AI & Backend Systems
Designed scalable asynchronous microservices for automated CV analysis and LLM-based ranking. Built a robust NLP platform using Transformers for intelligent semantic matching, with a backend infrastructure engineered to handle asynchronous tasks and API rate limiting.
Integrated Retrieval-Augmented Generation (RAG) into a full-stack blogging platform to provide AI-driven dynamic content summarization and intelligent semantic search capabilities.
Developed a secure, end-to-end encrypted messaging platform featuring robust user authentication and cryptographic message hashing to prioritize data privacy.
Built comprehensive Enterprise Resource Planning software tailored for e-commerce operations, focusing on scalable database management and robust backend services.
Built a centralized university web application allowing students to easily report and track lost items securely across campus.
Machine Learning & Computer Vision
Engineered a congestion simulation system using GIS road networks with interactive scenario visualization. Utilized OSMnx data and predictive models to simulate infrastructure changes for urban traffic flow optimization.
Fine-tuned YOLOv11 and successfully deployed it directly onboard a drone's embedded edge device for real-time drone-to-drone tracking and visual identification.
Developed a real-time driver monitoring and road perception system integrating lane detection, drowsiness detection, and monocular depth estimation to support safe driving and scene understanding.
Designed and evaluated multiple deep learning architectures including LSTM, BERT, GRU, and Conv1D for advanced natural language processing and robust sentiment classification.
Engineered an accurate real estate valuation tool by fine-tuning XGBoost and custom Neural Networks to predict housing prices based on multifaceted property data.
Robotics & IoT
Engineered an embedded C++ system using Arduino to fuse MPU6050 accelerometer and gyroscope data through a Kalman Filter, significantly improving noise reduction and orientation accuracy.
Designed an intelligent IoT hardware system for continuous environmental monitoring, featuring automatic gas detection and emergency shut-off mechanisms.
Designed and built a disaster-response robot prototype featuring onboard computer vision and autonomous navigation for hazardous environments.
Featured In & Media Coverage
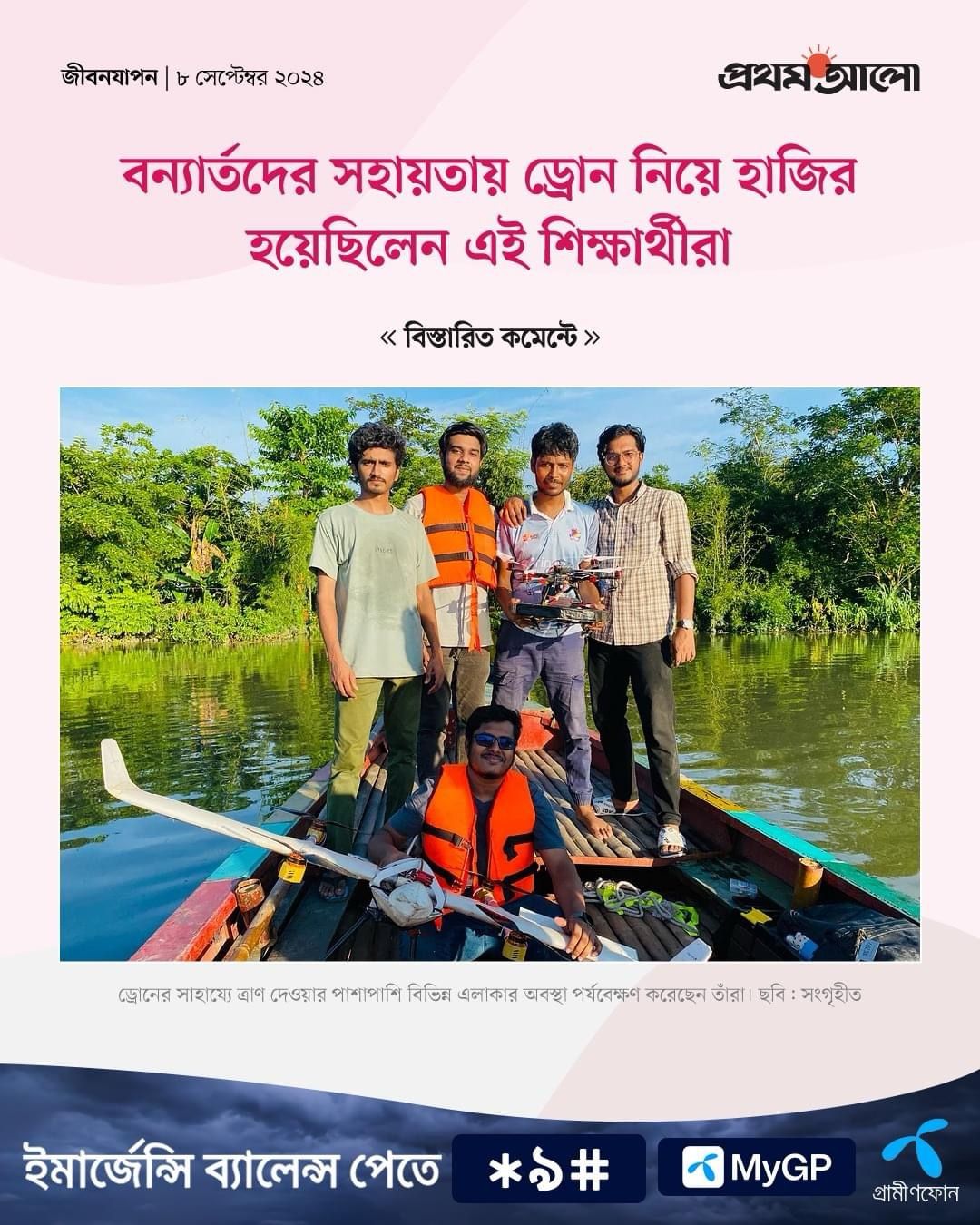
Prothom Alo
Featured for flood rescue operations and autonomous VTOL innovations with RaptorX.
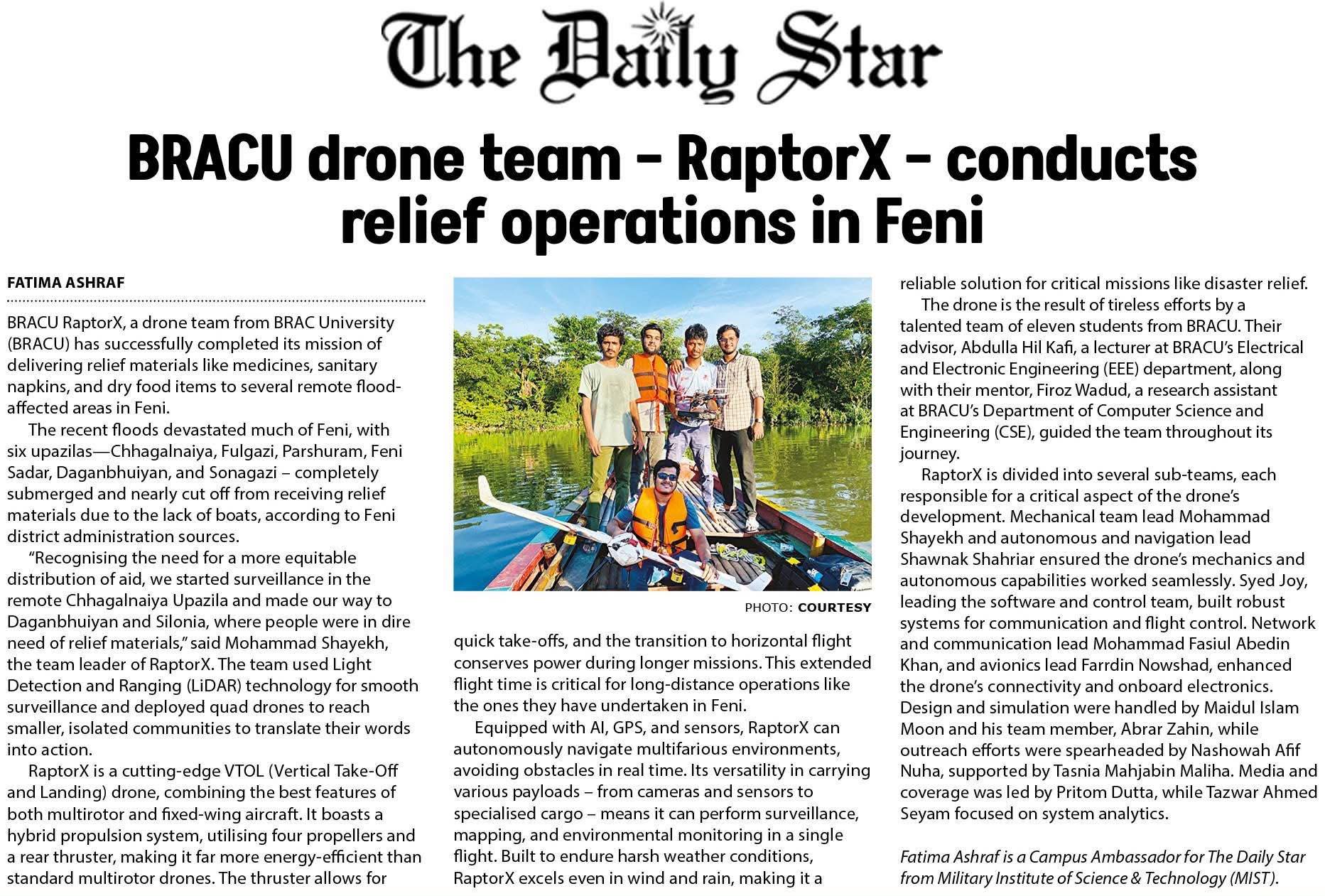
The Daily Star
Highlighting the impact of our drone deployment for delivering relief supplies in Feni.

Robi Axiata
Coverage of innovative robotics and automation projects built during academic research.
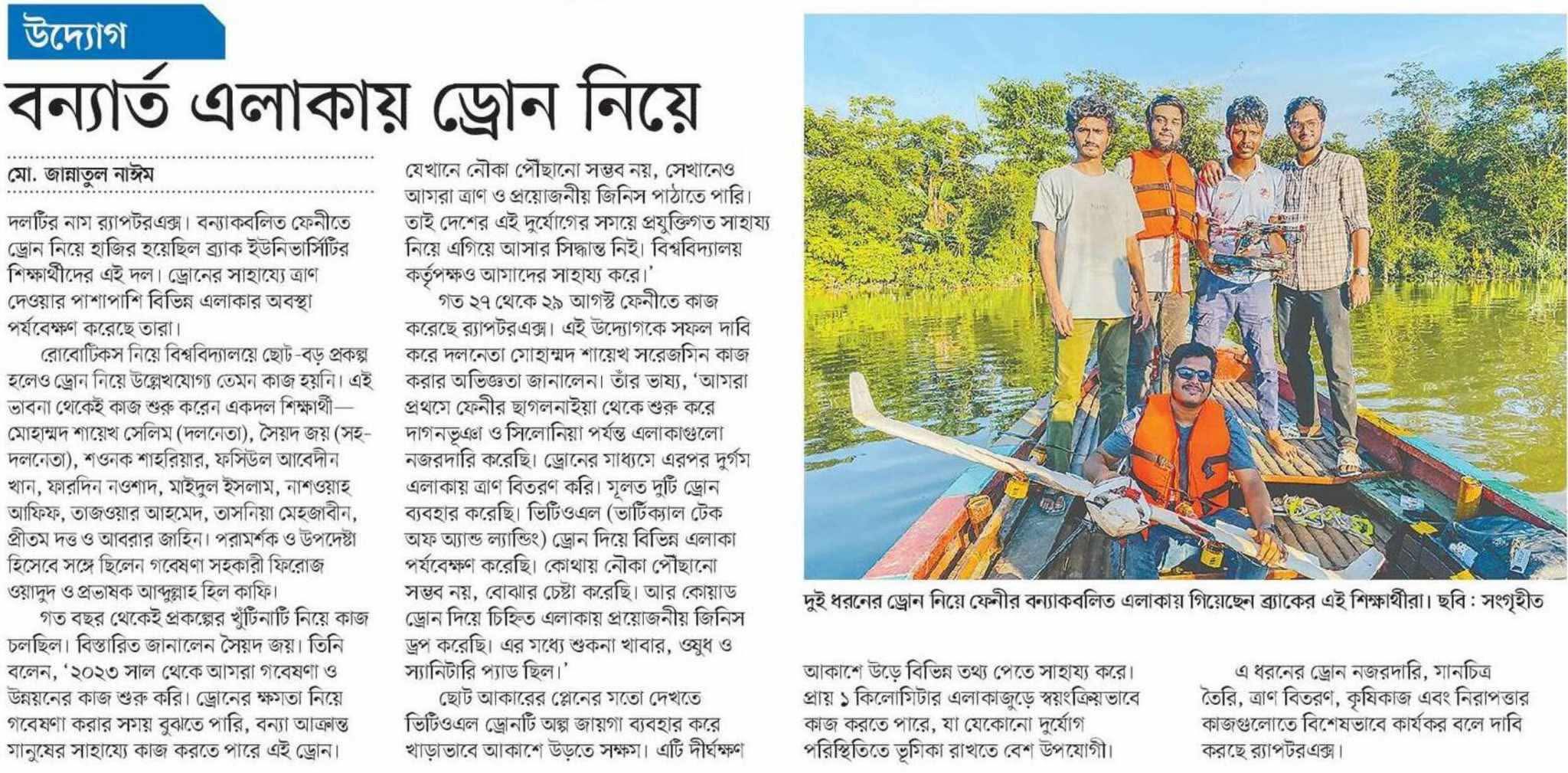
Prothom Alo
Further coverage of RaptorX's development, testing, and representation at the field mission.
News24
Special feature on BRACU Duburi showcasing pioneering autonomous underwater vehicle (AUV) research.

News24
Broadcast coverage highlighting Duburi's real-time underwater AI vision pipelines and robotics innovations.

BRACU Duburi AUV
Field testing with the BRACU Duburi team, pioneering autonomous underwater vehicle (AUV) research and real-time vision pipelines.

BRACU Mongol-Tori
Showcasing our custom-built Mars rover prototype, featuring terrain-aware SLAM mapping and ROS-based autonomy.
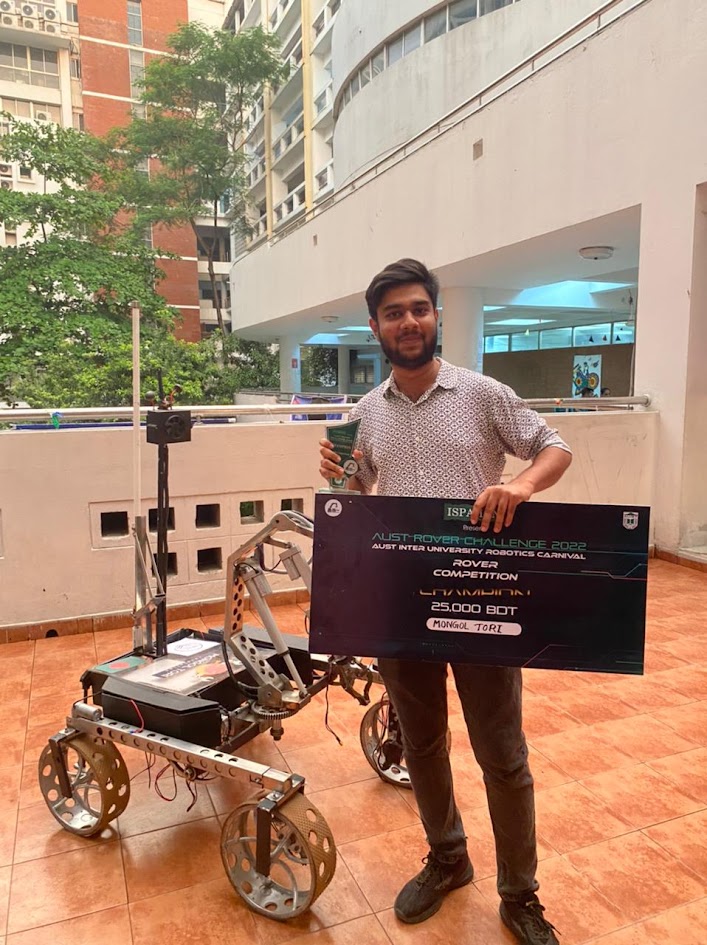
AUST Rover Challenge Champion
Celebrating our championship victory at the AUST Inter-University Robotics Carnival with the Mongol-Tori team.

Kibo Robot Programming Challenge
Receiving the 3rd Place Award in the prestigious JAXA Kibo Robot Programming Competition (Bangladesh Round).
ROBOSUB 2023
Honored as the 1st Runner-up globally at the RoboNation ROBOSUB 2023 competition in San Diego, California.
Global Achievements & Awards
San Diego, California, USA

The Mars Society (Utah, USA)
Bangalore, India

BRAC University
Leicester, England

JAXA (Bangladesh Round)
BRAC University